Robotic Engineering
Tug of War Contest
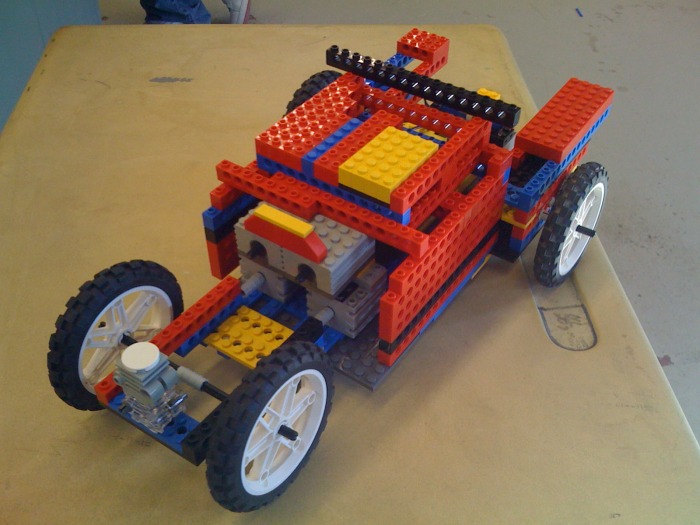
Here we have the second place winner of the tug of war contest. We like to call this robot the Assassinator. It is a very big and heavy machine that consists of a lot of gears hidden in the robot. The RCX is also hidden in the middle of the robot. Attached to the robot is a touch sensor to make it tug all the competitors. The Assassinator is a very successful design that Abe and I have created. Below there are many pictures of this beastly robot.
Successful Prototype





Elevation Test
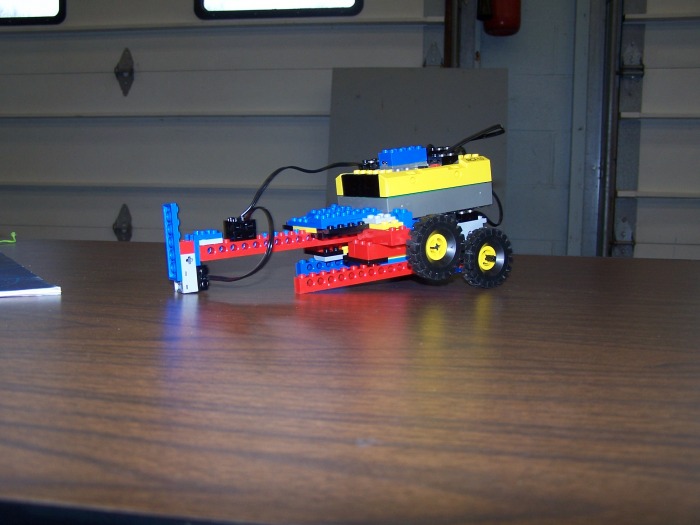
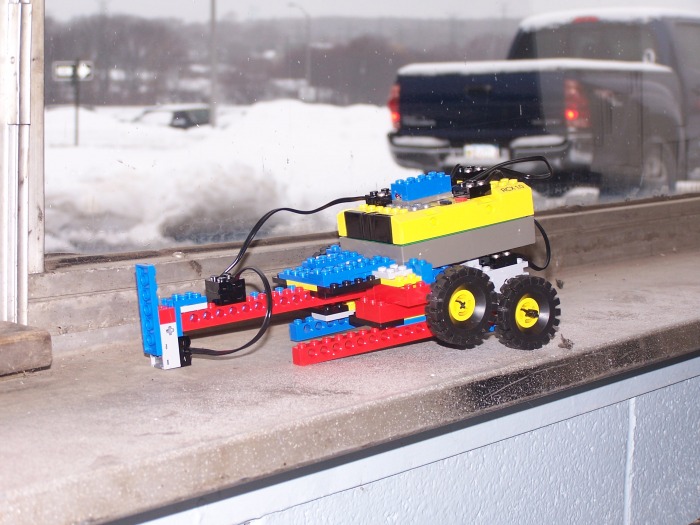
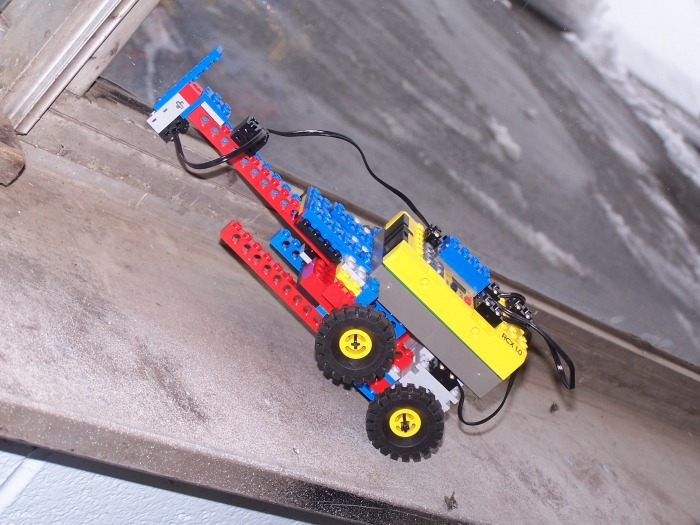
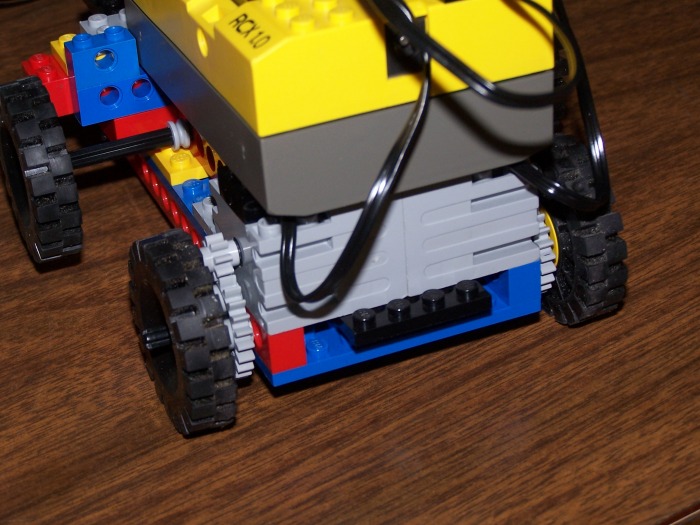
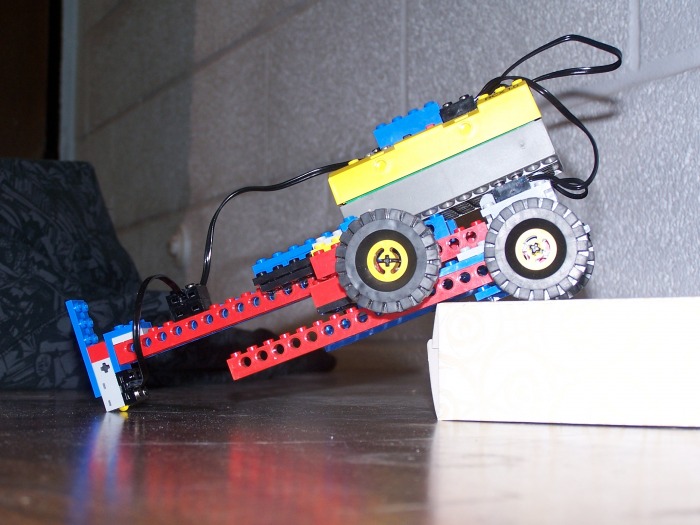
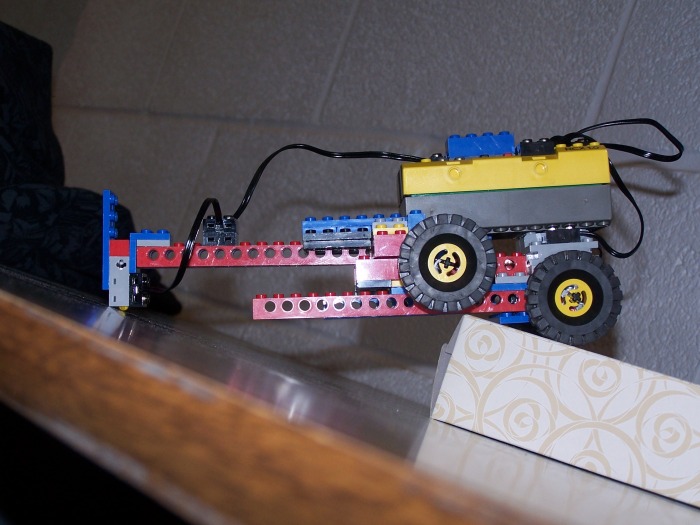
Below is my elevation project. The robot showed below had elevated 45 degrees. I made it very light weight and all wheel drive. The RCX acts as a remote to take weight off the robot. The back of the robot is higher than the front so it will have an even transition all the way up the ramp. Below is also a video of my robot elevating up the ramp.
Successful Prototype


| 100_1438.mov | |
| File Size: | 1929 kb |
| File Type: | mov |
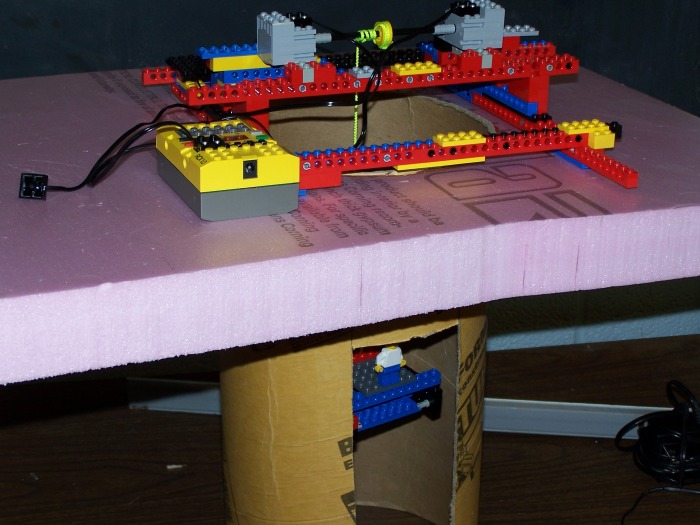
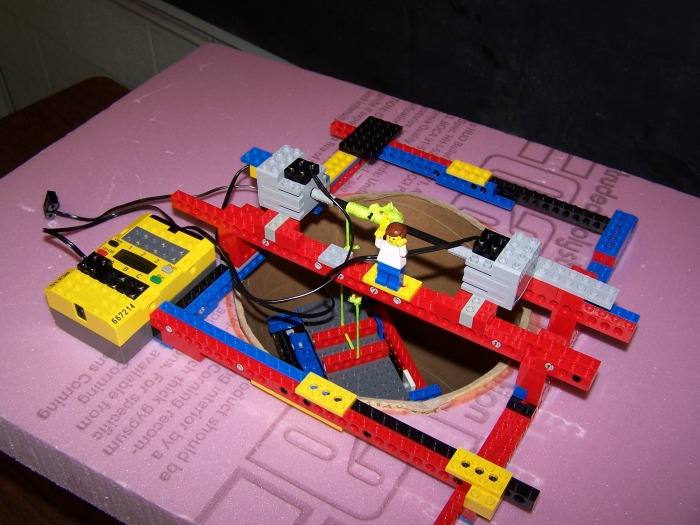
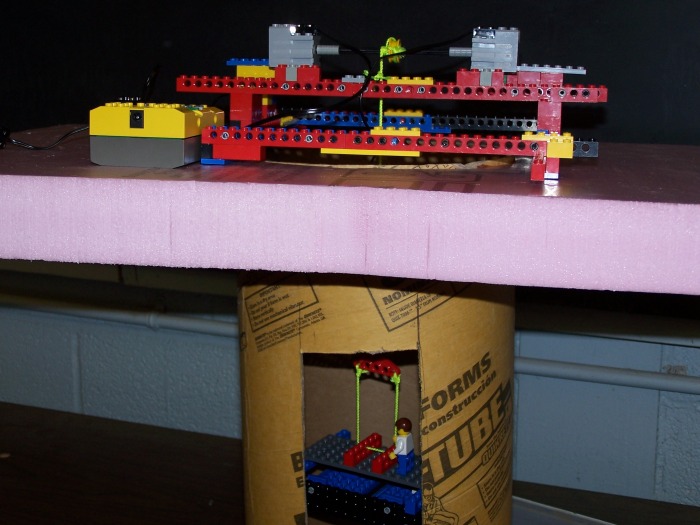
Project to Save Joe the Plumber
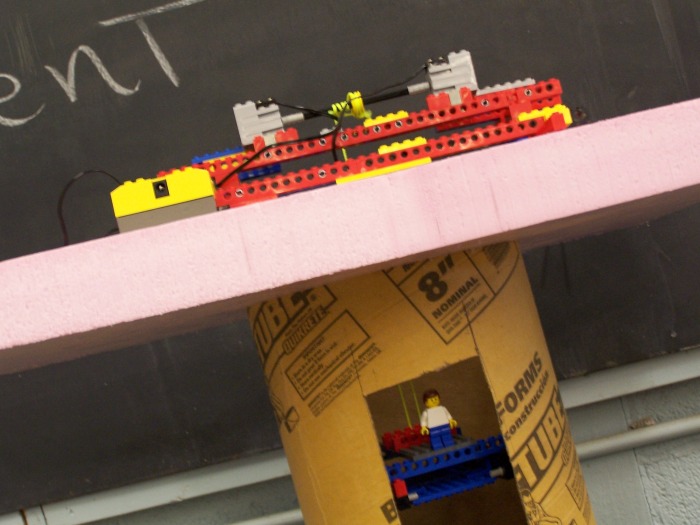
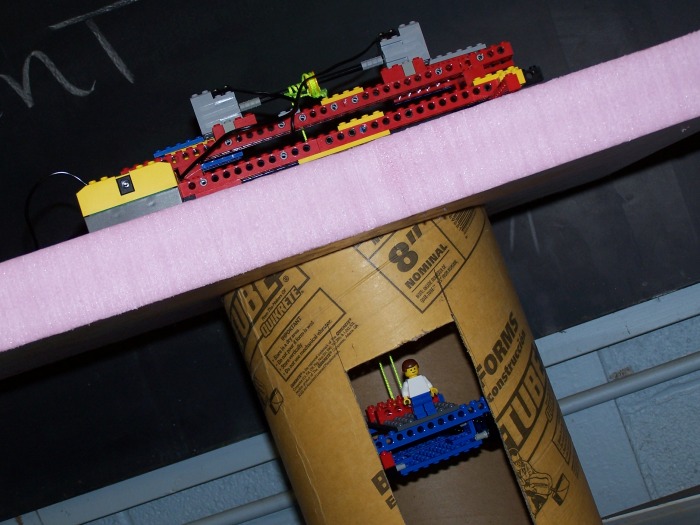
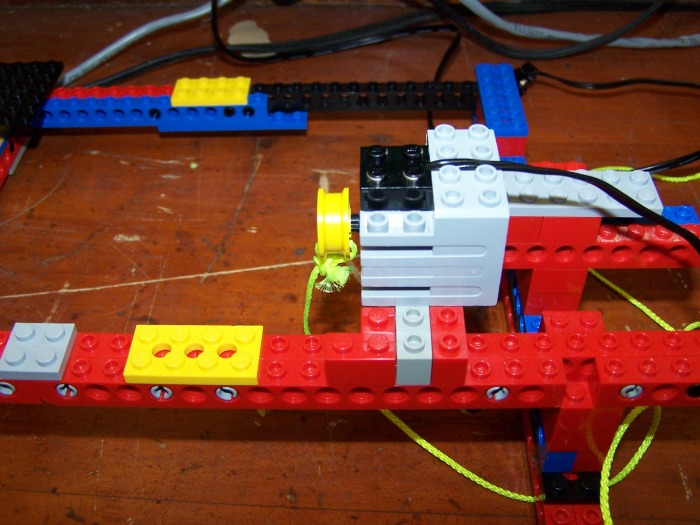
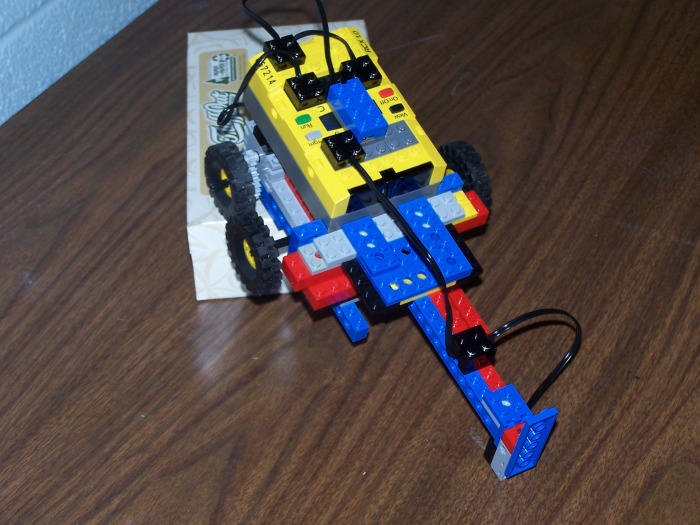
Here we have a very complicated test. The robot that we have created has to actually go down in a tube and save a lego dude called Joe the plumber. We were very successful in this project. What my partner and I have done was build a base around the tube with two motors connected to act as a crane. We also built a clamp that will clamp Joe the plumber and rescue him from the bottom of the tube. We have tried a couple of prototypes that have failed but in the end we were very successful in out actions. We have two stings connected to the base and the clamp and the clamp goes down the tube and picks Joe the plumber up. This was a very fun and exciting project.
Successful Prototype
Failure Prototypes
We tried this prototype first and it would not clamp Joe the plumber. What it would do is approach Joe the plumber and it would just crush him. The space is way to skinny and all it will do it hit Joe the plumber. This prototype is a failure and needs a lot more work to be done with it.
In this prototype we had failure in saving Joe the plumber. The opening was too wide to actually clamp him in place. What it would do is do down the pipe and it would approach Joe the plumber. Then it would just go around him and not pick him up. There is more that has to be done to this prototype to be successful.
| 100_1650.mov | |
| File Size: | 3063 kb |
| File Type: | mov |
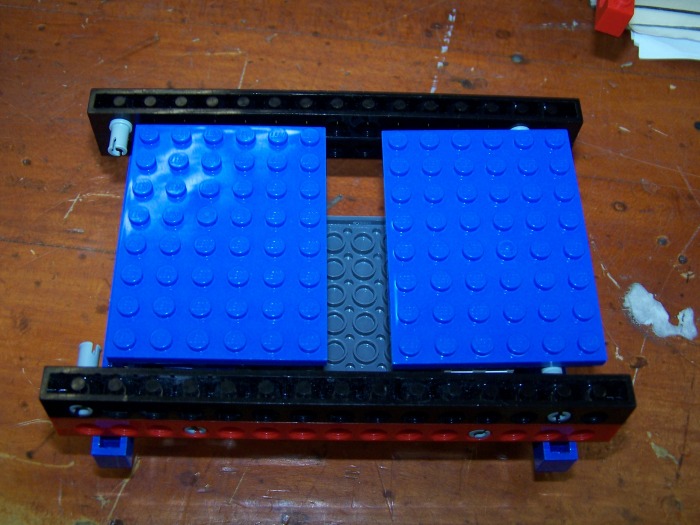
Table Bot Project
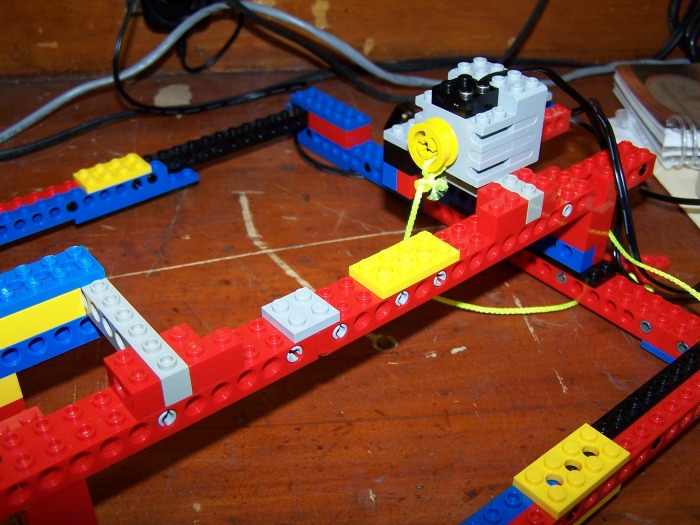
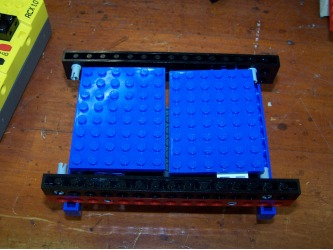
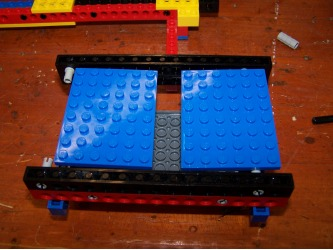
This project was a very difficult project. Building it wasn’t as difficult as getting the right program for it. There were a lot of new icons in the robotics lab but my partner and I got through that and made a successful project. The robot would always go too fast and want to go off the table so what we did was add gears (as shown in the picture). All in all my partner and I had a lot of fun doing this project. We can’t wait for the next project for all you to see.


Failure Prototypes
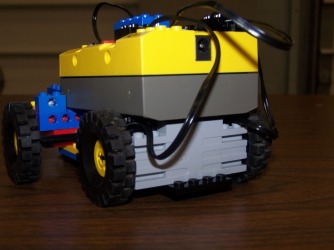
In this prototype we had a little bit of failure. The tablebot would go way to fast on the table and go off the table causing it to ruin our project and make us re-build it. My partner and I have thought long and hard about what to do. We made a program that would make it slower but it was still way to fast. So what we did was add gears to the tablebot and we had great success.
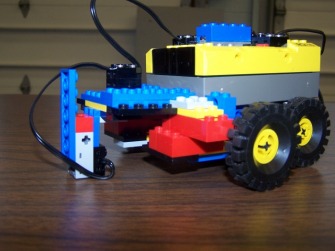
In this prototype we also had failure. The touch sensor is way to close to the body of the robot. So what we had to do to fix this was ass a long arm to attach to the touch sensor. What this would do is when the sensor would go off the table it would have enough time to stop and go back to go a different route. In this failure prototype the robot would go right off the table because it wouldn’t have enough time to stop. Now that we added the long arm, my partner and I have had great success.
Activity A
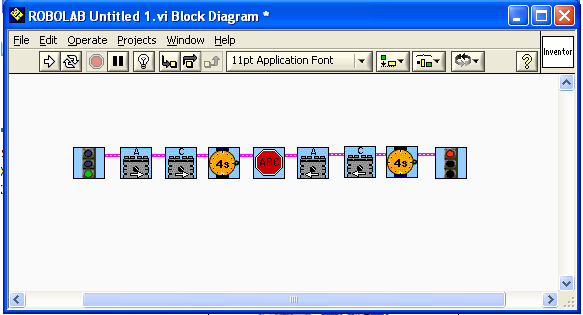
In “Activity A” what we had to do was turn the RCX on and it had to go until the light sensor hit the black line of tape. When it hit the black line of tape motors A and C would stop and then the light on the top of the RCX would go on.
Failure: The main problem we were having was the programming. Building the robot was simple because it was posted on the website that the teacher had given us. So there really wasn’t too much failure to go on in activity A.
| 100_2132.mov | |
| File Size: | 2484 kb |
| File Type: | mov |
Activity B
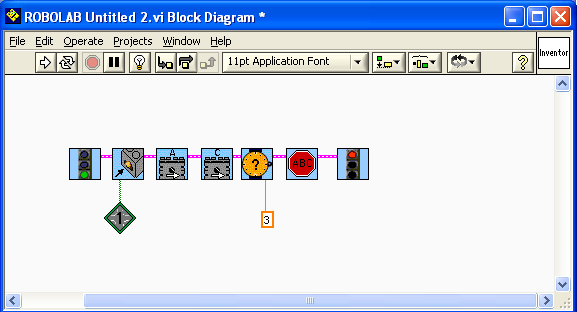
In “Activity B” what we had to do was turn the RCX on and it had to follow a black line of tape until the light sensor hit the white part of the paper. When it hit the white part of the paper motors A and C would stop and then the light on the top of the RCX would go on.
Failure: The same type of failure occurred in the activity just like activity A. The programming was very hard to get perfect for a great success. At first the RCX was going way to fast and we had to slow it down a little. But that was mainly our failure with this activity.
| 100_2133.mov | |
| File Size: | 1574 kb |
| File Type: | mov |
Activity C
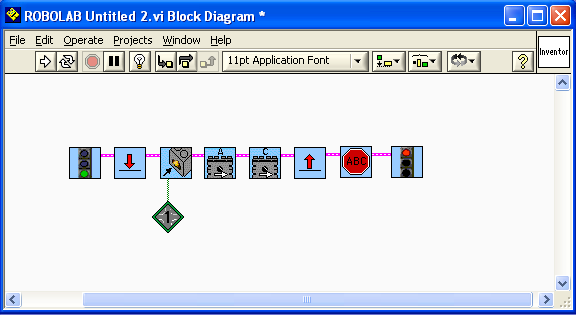
In “Activity C” we needed to make our robot follow the S line curve. This was a simple project because it was almost like the program that we had to follow the black line. It didn’t take that long to accomplish and like always we are having fun doing these projects. The next one is going to be a challenge!
Failure: Like always the only failure we have had was the program. The robot can’t be a failure just because it is the model from the website posted. So all in all with these activities all we have had for failure was the programming but we got it done.
| 100_2236.mov | |
| File Size: | 2438 kb |
| File Type: | mov |
In “Activity D” we needed to make our robot go around the track as fast as it can. This was a simple project because it was almost like the program that we had to follow the S curve. It didn’t take that long to accomplish and like always we are having fun doing these projects. You know how we do. I’m sure the next one is going to be a challenge!
Failure: Like always the only failure we have had was the program. The robot can’t be a failure just because it is the model from the website posted. So all in all with these activities all we have had for failure was the programming but we got it done.
| 100_2266.mov | |
| File Size: | 2786 kb |
| File Type: | mov |
Final Projects (Part 1)
Pick Best One- give reasons why it is your best
Develop Idea- make a few designs of that one and see how it would work best.
Test/Evaluate- make sure everything works and if it doesnt then go bak and re do it.
Presentation- Present your work to the class
Final Projects (Part 2)